Application au pendule utilisé dans le TP
Le pendule à étudier est constitué d'une tige et d'autres accessoires dont deux barreaux horizontaux placés à la même distance de l'axe de rotation.
Pour équilibrer le pendule à l'horizontal on utilise une masse d'équilibrage \((M_{0})\) placée dans le barreau situé à côté du cylindre \(C_{1}\).
La figure ci-dessus est une simplification du schéma du système à étudier : on « oubliera » les accessoires et on parlera seulement de la « tige »...
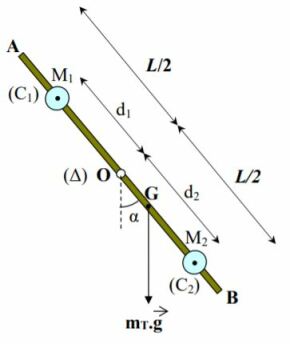
La tige \(AB\) de longueur \(L\) de masse \(m\) tourne autour de l'axe \((\Delta)\) qui passe par son milieu \(O\).
Deux masselottes cylindriques \((C_{1})\) et \((C_{2})\) sont fixées dessus, aux points \(M_{1}\) et \(M_{2}\), à des distances respectives de \(O\) : \(OM_{1} = d_{1}\) et \(OM_{2} = d_{2}\). Les masses et rayons des cylindres (C_{1}) et (C_{2}) sont
respectivement \(m_{1}\), \(r_{1}\), \(m_{2}\) et \(r_{2}\).
On appelle \(G\) le centre de masse du pendule complet (« barre» +cylindres), \(m_{T}\) sa masse totale \((m_{T} = m + m_{1} + m_{2})\), \(J_{T}\) son moment d'inertie par rapport à l'axe de rotation \((\Delta)\), et on pose \(OG = a\).
La période d'oscillation de l'équipage est alors donnée par la relation (1) : \(T=2\pi\sqrt{\frac{J_{T}}{m_{T}ga}}\).
a) Expression de la distance \(OG = a\) :
On utilise la relation générale vectorielle donnant la position, par rapport à un point \(O\), du
barycentre \(G\) de plusieurs masses \(m_1, m_2, ... m_P\) placées aux points \(A_1, A_2, ... A_P\) :
\(\overrightarrow{OG}=\frac{m_{1}\overrightarrow{OA_{1}}+m_{2}\overrightarrow{OA_{2}}+...+m_{P}\overrightarrow{OA_{P}}}{m_{1}+m_{2}+...+m_{P}}\)
, ou encore
\(m_{T}\overrightarrow{OG}=m_{1}\overrightarrow{OA_{1}}+m_{2}\overrightarrow{OA_{2}}+...+m_{P}\overrightarrow{OA_{P}}\)
Appliquée au pendule du TP, cette relation devient:
\(m_{T}\overrightarrow{OG}=m_{1}\overrightarrow{OA_{1}}+m_{2}\overrightarrow{OA_{2}}+m\overrightarrow{OO}\)
ce dernier terme étant nul puisque le centre de masse de la barre (plus accessoires) de masse m est précisément le point O.
Les vecteurs \(\overrightarrow{OG,}\:\overrightarrow{OM_{1}}\: et \:\overrightarrow{OM_{2}}\) sont colinéaires, on peut donc les remplacer par leurs mesures algébriques: en posant \(\overrightarrow{OG}=a,\:\overrightarrow{OM_{1}}=-d_{1}\:et\: \overrightarrow{OM_{2}}=d_{2}\) , on obtient l'expression de \(m_T.a\) :
\(m_{T}.a =m_{2}.d_{2}- m_{1}.d_{1}\). (2)
b) Expression du moment d'inertie \(J_{T}\) par rapport à \(O\) :
Les moments d'inertie par rapport à un même point s'additionnent, donc on peut écrire
\(J_{T}=J_{0}+J_{(C_{1})/O}+J_{(C_{2})/O}\)
où \(J_0\) est le moment d'inertie du pendule non chargé (sans les cylindres) c'est-à-dire, de l'ensemble tige plus accessoires (notamment les deux barreaux horizontales que supportent les cylindres).
Pour calculer les moments d'inertie de chaque cylindre par rapport à O, on applique le théorème de Huygens:
Pour un solide de masse m et dont le moment d'inertie par rapport à un axe passant par son centre de gravité \(G\) est \(J_G\), le moment d'inertie \(J_{/O}\) par rapport à un axe passant par un point \(O\) quelconque est donné par :
\(J_{/O}=J_{G}+m.OG^{2}\)
Ainsi, si on appelle \(J_1\) et \(J_2\) les moments d'inertie des deux cylindres par rapport à leur propre axe de symétrie, on obtient :
\(J_{(C1)/O} = J_1 + m_1.d_1^2, \: avec \: J_1 = ½ m_1.r_1^2\),
\(J_{(C2)/O} = J_2 + m_2.d_2^2, \: avec \: J_2 = ½ m_2r_2^2\) .
Le moment d'inertie JT du pendule a finalement pour expression :
\(J_T = J_0 + J_1 + J_2 + m_1.d_1^2 + m_2.d_2^2\) (3)
c) Expression de la période \(T\) du pendule pesant :
En reportant dans la relation (1) les expressions de \(m_T.a\) et de \(J_T\) qui viennent d'être obtenues, on obtient sans difficulté :
\(T=2\pi\sqrt{\frac{J_{0}+J_{1}+m_{1}d_{1}^{2}+m_{2}d_{2}^{2}}{(m_{2}d_{2}-m_{1}d_{1})}}\) (4)